
20 Jahre Vernetzung im Fahrzeug
Joseph Notaro, Vice President Worldwide Automotive Strategy and Business Development, ON Semiconductor.
Fahrzeuge werden immer fortschrittlicher, und wenn wir etwa 20 Jahre zurückblicken, sind die Veränderungen erheblich. Fahrzeuge waren hauptsächlich mechanisch, mit einigen hydraulischen Teilsystemen für die Bremsen, während sich die Fahrzeugelektronik praktisch auf einfache Beleuchtungskreise, Zündsysteme und das Laden der Batterie beschränkte. Als praktisch erwies sich ein Kabelbaum, um direkte Verbindungen zwischen den (relativ wenigen) elektronischen Teilsystemen im Fahrzeug herzustellen, und obwohl einige Kabelbäume komplex waren, war der Ansatz zu diesem Zeitpunkt überschaubar.
Selbst als erstmals Audiosysteme im Fahrzeug eingeführt wurden, waren die Anforderungen an die Verkabelung relativ einfach und umfassten die Stromversorgung und einfache Verbindungen zu Lautsprechern und Antennen. Um die Jahrhundertwende ist der Elektronikanteil in Fahrzeugen erheblich gestiegen, angetrieben von Techniken wie Radsensoren für die Traktionskontrolle und das Antiblockiersystem (ABS) sowie Aufprallsensoren zum Auslösen von Airbags. Dies führte zur Einführung einer neuen Herangehensweise, die auf im Fahrzeug verteilten/satellitengestützten elektronischen Steuereinheiten (ECUs; Electronic Control Units) basierte.
Die Technologie hat sich weiter verbessert und hochzuverlässige elektronische Systeme sind entscheidend für die Sicherheit, Effizienz und den Komfort der Fahrzeuge geworden, die wir heute auf der Straße sehen. Viele der Funktionen dienen dazu, dem Fahrer zu helfen, die Kontrolle über das Fahrzeug zu behalten – und zwar durch elektrisch-motorische Unterstützung der Lenk-, Brems-, Traktions- und Drehmomentsysteme. In diese Kategorie fallen verschiedene Funktionen, darunter elektronische Stabilitätsprogramme (ESP), elektrische Servolenkung (EPS), aktive Federung und ABS. Weniger kritische Systeme in Fahrzeugen wie die Beleuchtung, Scheibenwischer, Türschlösser, Fenster, Schiebedächer und immer fortschrittlichere Infotainmentsysteme werden ebenfalls elektronisch gesteuert und verfügen jeweils über eine eigene ECU, die mit den anderen Systemen im gesamten Fahrzeug kommunizieren muss.
Seit geraumer Zeit werden immer mehr Fahrzeuge um fortschrittliche Fahrerassistenzsysteme (ADAS) erweitert – auch Klein- und Mittelklasse-Fahrzeuge. Diese Systeme nutzen mehrere hochentwickelte Sensoren, um eine Vielzahl von Sicherheits- und Komfortfunktionen bereitzustellen.
So bieten ADAS-fähige Kameras zusätzliche Funktionen, z. B. eine 360°-Ansicht für das Einparken. Einige Fahrzeuge der Oberklasse sind heute sogar mit bis zu einem Dutzend Kameras ausgestattet. Da diese Kameras sicherheitsrelevante Informationen bereitstellen, steigt der Bedarf an höherer Auflösung, was zu immer größeren Datenmengen führt, die zuverlässig und sicher ohne Latenz im gesamten Fahrzeug übertragen werden müssen.
Die neuen Technologien der Fahrzeuge wären nicht möglich, wenn die Autohersteller nicht vom ursprünglichen Kabelbaum abgewichen wären. Stattdessen kommen Multiplexing und Netzwerke zum Einsatz, um die Datenanbindung zu verbessern und gleichzeitig die physischen Verbindungen zwischen den Systemen zu verringern.
In-Vehicle-Networking-/IVN-Protokolle
Selbst Kleinfahrzeuge und Fahrzeuge der Mittelklasse enthalten heute Dutzende von ECUs, wodurch Hunderte, wenn nicht Tausende von Signalen entstehen, die innerhalb des Fahrzeugs umhergeleitet werden müssen. Ein Kabelbaum mit den dazugehörigen Steckverbindern, der alle Strom- und Datensignale in einem modernen Fahrzeug verteilt, wäre heute so groß, schwer, komplex und teuer, dass er unpraktisch wäre. Darüber hinaus würde jeder Kabelbaum vollständig auf ein einzelnes Modell innerhalb einer Fahrzeugfamilie zugeschnitten sein. Die fahrzeuginterne Vernetzung befasst sich mit diesen Anforderungen, bringt jedoch ihre eigenen Designüberlegungen mit sich.
Die Anforderungen an ECUs und die dazugehörigen Systeme sind je nach Steuereinheit und Funktion sehr unterschiedlich. Größen wie Geschwindigkeit und Bandbreite, zulässiger Jitter und Antwortzeit (Latenz) sowie der Grad der Redundanz variieren erheblich und wirken sich auf die Anforderung der Datenanbindung und in gewissem Maße auch auf das verwendete Netzwerkprotokoll aus. So überträgt eine Frontkamera, die Teil eines ADAS-Systems ist, ständig erhebliche Mengen hochkritischer Daten, während ein Sensor, der Informationen zum Kraftstoffstand liefert, nur vergleichsweise selten ein einfaches Datenpaket überträgt.
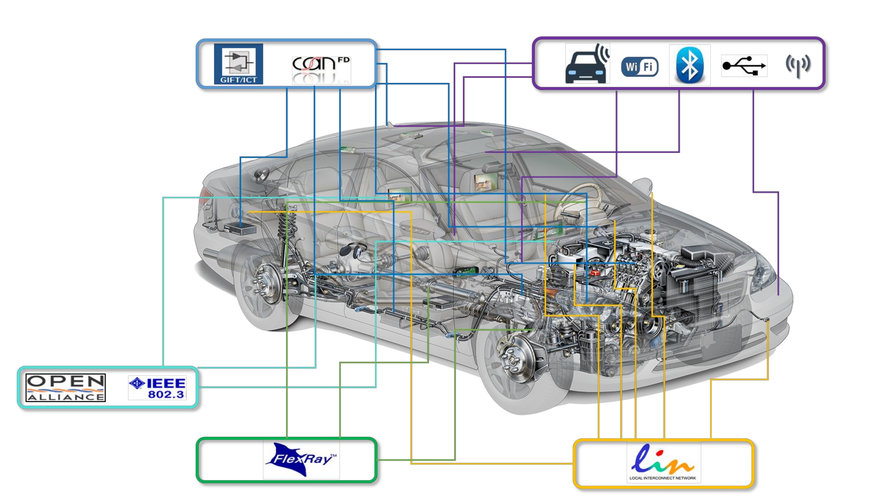
Im Laufe der Zeit haben sich verschiedene Netzwerklösungen für Fahrzeuge entwickelt, um den wachsenden Anforderungen an die Datenübertragung in Fahrzeugen gerecht zu werden:
- Local Interconnect Network (LIN) – mit einer relativ niedrigen Bandbreite und Geschwindigkeiten bis 20 KBit/s. Wird hauptsächlich für Subsysteme verwendet, bei denen Kosten und Einfachheit die Hauptanliegen sind.
- Controller Area Network (CAN) – ein Standard, der in den 1980er Jahren von der Robert Bosch GmbH entwickelt wurde und 1994 zum ISO-Standard wurde. Er ist das am weitesten verbreitete IVN. Jedes Jahr werden Hunderte Millionen Knoten implementiert. Mit Geschwindigkeiten bis 1 MBit/s werden hauptsächlich ECUs an verschiedene Sensoren angeschlossen. CAN bietet Multiplexing, sodass sich Sensoren von einer oder mehreren ECUs gemeinsam nutzen lassen. CAN verwendet ein einfaches Paar verdrillter Kupferdrähte (Twisted Pair) und kann die Anzahl der benötigten Kabel gegenüber herkömmlichen Kabelbäumen um bis zu 40 % reduzieren.
- FlexRay-Kommunikationsbus – als CAN zu langsam wurde, kam das FlexRay-Protokoll ins Spiel, um Netzwerkgeschwindigkeiten bis 10 MBit/s für Anwendungen wie Drive-/Steer-by-Wire (X-by-Wire) etc. bereitzustellen. FlexRay unterstützt mehrere Netzwerktopologien.
- Media Oriented Systems Transport (MOST) – ein proprietärer Standard, der für den Transport von Audio-, Video-, Sprach- und Datensignalen entwickelt wurde. Er bietet Geschwindigkeiten bis 150 MBit/s.
Diese Protokolle haben sich ständig weiterentwickelt, um den sich ändernden (und anspruchsvolleren) Anforderungen moderner Fahrzeuge gerecht zu werden. So hat Bosch auf der Internationalen CAN-Konferenz 2012 eine neue Version von CAN vorgestellt – CAN FD. CAN FD kombiniert die Kernfunktionen von CAN mit einer höheren Datenrate und größeren Datennutzlasten.
Aufteilung innerhalb des IVN
In Bezug auf die Netzwerklatenz und Reaktionsfähigkeit weisen verschiedene Subsysteme im Fahrzeug unterschiedliche Anforderungen auf, was die Wahl des verwendeten IVN-Protokolls beeinflusst. So hat ein Steer-by-Wire-Signal eine höhere Priorität als eine Anforderung zum Ändern des Radiosenders, und das Netzwerk muss entsprechend konfiguriert werden.
Ein Fahrzeug ist meist in mehrere Domänen unterteilt, die verschiedene Merkmale, Funktionen und Anforderungen vereinen. Aus Sicherheits-, Emissions- und Gesetzgebungsgründen gelten für zwei gängige Bereiche – Antriebsstrang (Steuerung von Motor und Getriebe) und Fahrwerk (Steuerung von Federung, Lenkung und Bremsen) – „harte Echtzeit“-Anforderungen. Die Motorsteuerung spielt eine entscheidende Rolle bei der Einhaltung der Vorschriften zum Schadstoffausstoß wie Feinstaub und bei der Sicherstellung der höchstmöglichen Energieeffizienz. Diese Steuerungsebene erfordert eine schnelle Abfrage von Sensoren (im ms-Bereich), Mikrocontroller mit hoher Leistungsfähigkeit und einen häufigen Datenaustausch mit anderen Fahrzeugdomänen.
Die Fahrwerk-Domäne ist für die Sicherheit entscheidend, da sie Stabilitätsfunktionen, ABS und zunehmend auch Steer-by-Wire umfasst. Die Datenanforderungen ähneln denen der Antriebsstrang-Domäne, obwohl die Sicherheit hier Anforderungen stellt, die sich am besten mit zeitgesteuerten oder deterministischen Netzwerktechniken erfüllen lassen. Innerhalb der Karosserie-Domäne gibt es eine Reihe von Funktionen, darunter Beleuchtung, Fensterheber, Türen, Klimaanlage, Scheibenwischer etc. Diese Funktionen neigen dazu, relativ kleine Informationspakete untereinander auszutauschen, hauptsächlich um auf Eingaben des Fahrers oder der Insassen zu reagieren.
Telematik/Infotainment ist ein zunehmend wichtiger Aspekt der Fahrzeugkommunikation, der Navigationssysteme, Freisprechtelefonie, Audiosysteme und Ferndiagnose umfasst. Diese Domäne wird nicht von zeitkritischen Nachrichten gesteuert, sondern von Multimedia-Datenströmen, bei denen Signalintegrität und Datenschutz die wichtigsten Anforderungen sind. Mit zunehmender Vernetzung der Fahrzeuge untereinander (V2V) und mit der Umgebung um sie herum (V2X) gewinnt die Funkkommunikation und die damit verbundene Sicherheit hier zunehmend an Bedeutung.
Während Antriebsstrang, Fahrwerk, Karosserie und Telematik die vier Hauptdomänen sind, führt die Zunahme von Sicherheitsfunktionen wie Aufprallsensoren, Airbag-Aktivierung, Spurhalteassistent, adaptive Geschwindigkeitsregelung (ACC) und Fahrerüberwachung zur Definition einer weiteren Domäne, die heute als „aktive und passive Sicherheit“ bezeichnet wird.
Zukunft des IVN
Die Geschwindigkeit bei der Entwicklung und Erweiterung von Funktionen in Fahrzeugen stellt die Leistungsfähigkeit vieler bestehender Netzwerkprotokolle in Frage. Die Fahrzeughersteller suchen nun in der Elektronikindustrie nach Protokollen, mit denen sich die aktuellen und zukünftigen Fortschritte in der Automobilelektronik bewältigen lassen.
Da unsere Fahrzeuge immer komplexer werden und die Kommunikation mit anderen Fahrzeugen und der umgebenden Infrastruktur wie z. B. Smart Cities immer mehr zunimmt, wird sich die Fahrzeugarchitektur ändern. Wahrscheinlich wird Ethernet zum dominierenden IVN und den Übergang von signalbasierter Kommunikation zu serviceorientierten Architekturen erleichtern.
Ethernet wird häufig als Wahl für das zukünftige IVN diskutiert, da es das Potenzial zur Vereinheitlichung hin zu einem einzigen Netzwerkstandard im gesamten Fahrzeug liefert. Ethernet bietet viele Vorteile – nicht zuletzt, dass es gut etabliert und bekannt ist, sofort Bauteile zur Verfügung stehen und die damit verbundenen Skaleneffekte genutzt werden können. Die verfügbare Bandbreite liegt im Gigabit-Bereich. Derzeit sind 10 GBit/s in der Entwicklung.
Ein Problem bei Ethernet als IVN ist seine Latenz, die es für sicherheitskritische Anwendungen weniger geeignet macht. Neue Weiterentwicklungen wie 10BASE-T1S, ein kollisionsfreier 10-MBit/s-Standard, der über eine einzelne Twisted-Pair-Leitung mit integrierter Arbitrierung für den Knotenzugang übertragen wird, ebnet jetzt den Weg für die Zukunft des In-Vehicle-Netzwerks.
Fordern Sie weitere Informationen an…
