www.konstruktion-industrie.com
23
'21
Written on Modified on
Fuzzy Logic und Visionic: Robotik für die Atomindustrie
PRIMUS (Platform for Robotic Inspection and Maintenance for Unstructured Settings), entwickelt von Fuzzy Logic und Visionic für Framatome Intercontrôle, ist ein robotergestütztes ZfP-System (Zerstörungsfreie Prüfung) für nukleare Infrastrukturen. Dieses Software- und Hardwarepaket ist so konzipiert, dass es auch von nicht-robotikaffinen ZfP-Bedienern verwendet werden kann, was einen wesentlichen Unterschied zu den bestehenden Lösungen auf dem Robotik- und ZfP-Markt darstellt. Die Zusammenarbeit zwischen Fuzzy Logic, Visionic und Framatome begann im Rahmen von RIMA (Robotics for Inspection and Maintenance), einem Projekt der Europäischen Union, das die Einrichtung eines Netzwerks von digitalen Innovationszentren und Industrieverbänden zur Unterstützung der Entwicklung der Robotik zum Ziel hat.

Um effizient eingesetzt werden zu können, benötigen die heutigen ZfP-Technologien eine kontrollierte, laborähnliche Umgebung, was unter Feldbedingungen nur schwer zu erreichen ist. Mit der gleichen Herausforderung sieht sich Framatome Intercontrôle bei der Inspektion von Komponenten in den Primärkreisläufen von Kernkraftwerken (CNPE) konfrontiert, insbesondere bei speziellen Schweißnähten wie Anschlüssen an den Verbindungsstellen zwischen primären und sekundären Rohrleitungssystemen.
Um diese Herausforderungen zu meistern, setzt Framatome Intercontrôle Industrieroboter auf innovative Weise ein, um viele ZfP-Probleme zu lösen. Die von einem Roboter durchgeführte Ultraschallprüfung charakterisiert die inneren volumetrischen Defekte der Schweißnaht, um mögliche Risse zu erkennen. Derzeit werden diese Prüfungen vor Ort vorbereitet und erfordern einen 3D-Scan der Schweißnaht und eine Messung der Umgebung, wobei jede Schweißnaht und jede Umgebung geometrisch einzigartig sind. Ein Robotiker berechnet dann die Robotertrajektorie für die zukünftige Inspektion. Wenn die Umgebung zum Zeitpunkt der Inspektion von den ursprünglichen Messungen abweicht oder nicht genau mit dem archivierten Scan übereinstimmt, ist es nicht mehr möglich, die vorbereitete Trajektorie direkt anzupassen; die Messungen und Berechnungen der Trajektorie müssen erneut angepasst werden. Die nukleare Umgebung ist jedoch komplex und unterliegt sehr restriktiven Sicherheitsvorschriften. Jeder Eingriff ist daher mit hohen Personalkosten verbunden, zumal der Grenzwert für die Strahlenbelastung des Personals bei 12 Millisievert pro Jahr liegt, was die Kosten für eventuell notwendige Reparaturen erhöht.
Laut Yannick Caulier, Experte I, VTI Stufe III, COFFMET Stufe II bei Framatome/Intercontrôle: „Die Vorbereitung der Inspektionen ist eine komplexe, zeitaufwändige und kostspielige Aufgabe, da die Umwelt nicht einfach zu modellieren ist. Deshalb haben wir nach einem Softwarepaket gesucht, mit dem wir die Trajektorien leicht neu definieren können, um unsere Inspektionen an die Bedingungen der einzelnen Nuklearstandorte anzupassen“.
Die derzeitigen Industrieroboter und Programmierwerkzeuge sind nicht für unstrukturierte Feldumgebungen ausgelegt. Außerdem erfordert ihre Verwendung und Programmierung ein hohes Maß an Fachwissen. Um diese Beschränkungen zu überwinden, haben Fuzzy Logic und Visionic die PRIMUS-Plattform entwickelt.
Primus, eine einzigartige Software-Plattform
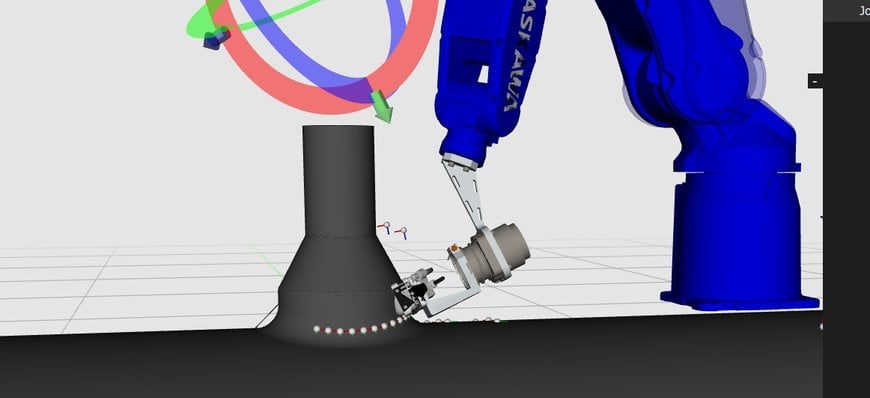
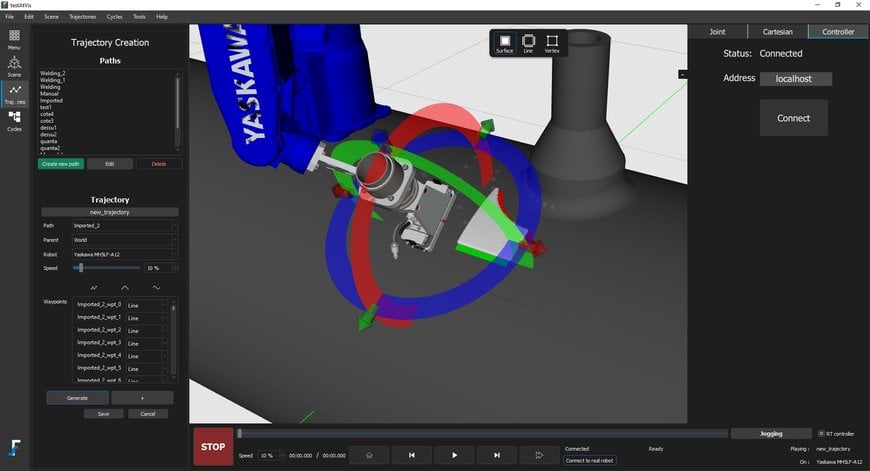
Die PRIMUS Software- und Hardwareplattform ermöglicht es ZfP-Dienstleistern, schnell und effizient auf Anfragen zur Inspektion von Infrastrukturen zu reagieren. Die Funktionsweise ist einfach: In einem ersten Schritt wird die Umgebung so modelliert, wie sie zum Zeitpunkt der Inspektion ist. Alle zusätzlichen Elemente, die den Ablauf behindern könnten, werden in diesen Modellierungsschritt integriert, und die Simulation des Prozesses vor der Inspektion vor Ort ist damit abgeschlossen. Im zweiten Schritt wird ein Roboter in der Nähe der geschweißten Bereiche der Rohre platziert. Die Prüfsonde muss mit großer Präzision bewegt werden, was den Einsatz eines Roboters erfordert, um eine genaue Positionierung und Ausrichtung zu erreichen. Mit der von Fuzzy Logic entwickelten Software können die Bediener den Roboter schnell einrichten, ohne ihn mit großer Genauigkeit auf dem Rohr positionieren zu müssen. Die in den Roboter integrierten 3D-Sensoren ermöglichen eine schnelle und einfache Anpassung des Roboters an seine reale Umgebung. Trajektorien können in Sekundenschnelle mit wenigen Mausklicks bestimmt werden. Die Kombination aus der von der Fuzzy Studio berechneten komplexen Trajektorie und dem 3D-Scan der Schweißnahtstruktur durch Visionic erzeugt den an die reale Oberfläche angepassten Prüfpfad. Der letzte Schritt besteht in der Prüfung der Schweißnaht mittels Ultraschall.
Diese Methode wurde bisher noch nie für die zerstörungsfreie Prüfung eingesetzt, und die erzielten Ergebnisse sind dank der Steuerung der Sondenpositionierung mit vorheriger Anpassung auf der Grundlage eines 3D-Scans der Oberfläche viel genauer.
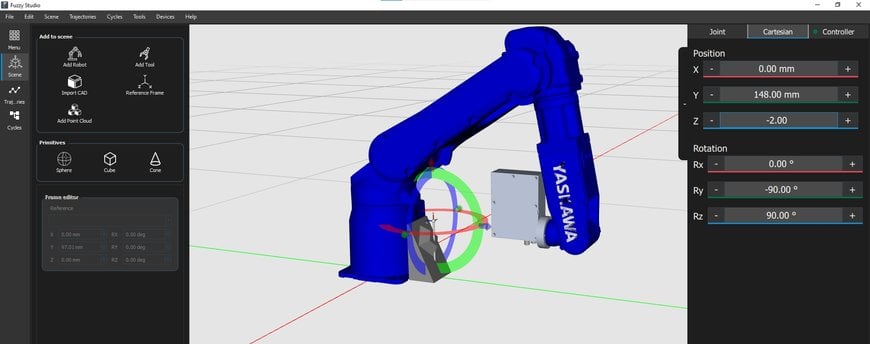
Visionic liefert die Roboter und ihr optisches System. Fuzzy Logic stellt die erweiterte agile Programmierumgebung zur Verfügung, so dass die Programmierung auch von Nicht-Robotikern durchgeführt werden kann und viele der Einrichtungsschritte entfallen.
Framatome Intercontrôle steuert sowohl das Know-how als auch einen Roboter-ZfP-Prüfstand für die Schweißnahtprüfung bei, um die PRIMUS-Lösung in einer betrieblichen Umgebung zu entwickeln, zu testen und zu validieren.
Dank des PRIMUS-Systems konnte die Inspektionszeit bei Framatome Intercontrôle von zwei Wochen auf einen Tag reduziert werden.
Darüber hinaus erhöht PRIMUS die Effizienz, Qualität und Sicherheit der zerstörungsfreien Prüfung und verringert gleichzeitig die Strahlenbelastung des Bedieners. Dank der Zusammenarbeit und der Unterstützung der Partner im RIMA-Netz wurde das PRIMUS-System in einer Rekordzeit von 14 Monaten entwickelt, eingeführt und getestet, wodurch die Industrierobotik bei der Inspektion nuklearer Infrastrukturen in den Vordergrund rückt.
Yannick Caulier erklärt: „Die ergonomische und vielseitige Software ohne Code, die auf allen PRIMUS-Robotern verwendet werden kann, bietet uns eine bessere Zugänglichkeit als je zuvor. Wir können den Roboter dort platzieren, wo wir ihn haben wollen, und seine Trajektorie mit wenigen Klicks erstellen. Das ist einer der Aspekte, die uns am meisten gereizt haben.“
Eine erfolgreiche Zusammenarbeit
Ryan Lober, CEO und Mitbegründer von Fuzzy Logic: „Framatome stößt, wie viele andere Industrieunternehmen auch, an die Grenzen dessen, was wir glauben, mit Industrierobotern erreichen zu können. Werkzeuge auf Expertenniveau sind jedoch ein limitierender Faktor. Indem wir eine Lösung anbieten, die auch für Nicht-Experten zugänglich ist, ebnen wir den Weg für den Einsatz von Robotern in diesen Anwendungen, die früher als unmöglich galten.“
Xavier Savin zufolge: „Diese spezielle Anwendung für Framatome, die ein besonderes Problem löst, kann überall dort eingesetzt werden, wo Materialprüfungen mit Ultraschall auf Oberflächen durchgeführt werden, deren Geometrie nicht vollständig vorhersehbar ist. Unsere Lösung kann auf Roboteranwendungen ausgedehnt werden, bei denen eine andere Definition der Trajektorie wichtig ist. Je variabler die Trajektorien sind, desto aussagekräftiger wird die Lösung sein.“
Yannick Caulier erklärt, dass die für diese Anwendung entwickelte Software auch für die Prüfung anderer Schweißnahtarten angepasst werden kann. „Es ist geplant, den Prototyp weiterzuentwickeln, mit neuen Funktionen und einer flüssigeren Prüfkette.“
RIMA, ein gewagter Schritt
Die Zusammenarbeit zwischen Framatome, Fuzzy Logic und Visionic wurde im Herbst 2019 im Rahmen des RIMA-Konsortiums gegründet. Framatome hatte eine Anforderung, die im Bereich der Robotik untypisch war. Das Unternehmen benötigte eine Roboterlösung, die auch von Nicht-Experten genutzt werden kann. Die Herausforderung bestand darin, eine Softwareplattform zu entwickeln, mit der die Robotertrajektorien definiert werden können, um die Inspektionen beim Schweißen von Rohren in einer Nuklearanlage anzupassen. Visionic und Fuzzy Logic antworteten gemeinsam, überzeugt von dem beispiellosen technologischen Potenzial ihrer Lösung.
RIMA bezuschusste die F&E-Kosten für das Visionic- und Fuzzy-Logic-Konsortium mit bis zu 300.000 €.
„RIMA finanzierte eine Technologie, die es noch nie zuvor gab, und reagierte damit auf einen atypischen Bedarf. Der mutige Schritt von RIMA hat sich ausgezahlt, denn innerhalb von 14 Monaten hat unsere PRIMUS-Lösung, die von einem Start-up und einem innovativen KMU entwickelt wurde, die Bedeutung ihrer Wirkung in einem Sektor bewiesen, der als sehr anspruchsvoll gilt“, freut sich Ryan Lober über den Erfolg.
Xavier Savin hingegen erklärt: „Wir waren uns des kommerziellen Potenzials unserer technischen Lösung bewusst. Es gibt echte Chancen für Primus auf dem internationalen Markt.
Alle 56 Kernreaktoren in Frankreich müssen umfassend saniert werden, damit sie nach 40 Jahren Betrieb weiter produzieren können. Die Erneuerung von Rohrleitungen in einem Kernkraftwerk ist kostspielig und komplex. Unsere Lösung, die eine Charakterisierung der Defekte ermöglicht und zuverlässige Ergebnisse liefert, erlaubt es, nach der Inspektion über die am besten geeigneten Instandhaltungsmaßnahmen zu entscheiden. Unsere Lösung bietet das Potenzial für erhebliche wirtschaftliche Vorteile. Dieses Potenzial lässt sich mit der Anzahl der in Europa und weltweit betriebenen Kraftwerke multiplizieren.“
flr.io