
www.konstruktion-industrie.com
17
'25
Written on Modified on
Echtzeit-Hindernisdetektion und Edge-Computing im Schienenverkehr
Moderne Technologien zur Hinderniserkennung im Bahnverkehr verbinden leistungsstarke Sensoren mit KI-basierter Echtzeitverarbeitung.
www.advantech.com

Bild 1: Das SOM-E781 von Advantech stellt für datenintensive Anwendungen ausreichend Leistung und schnelle Schnittstellen bereit.
(Bild: Advantech)
Dabei stehen hohe Anforderungen an Hardware und Architektur im Fokus, um eine autonome und sichere Zugsteuerung zu ermöglichen.
Die Automatisierung des Schienenverkehrs benötigt eine zuverlässige Identifizierung von Hindernissen und Gefahren im Gleisbereich. Dazu müssen die verwendeten Systeme Objekte im gesamten Umfeld rasch detektieren und klassifizieren.
Diese Erkennung erfordert auf dem Schienenfahrzeug multimodale Sensorsysteme und hochspezialisierte Rechnerarchitekturen, die eine Echtzeitverarbeitung der Daten erlauben und eine genaue Zuordnung von Art, Position und Merkmalen der erkannten Objekte ermöglichen. Aufgrund der kritischen Latenzanforderungen müssen die Funktionen lokal auf der Lokomotive oder dem Triebzug abgearbeitet werden. Lediglich ergänzende Aufgaben können in hybriden Edge-Cloud-Architekturen realisiert werden. Die Hardwareplattformen haben daher besondere Anforderungen an die Rechenleistung, die Geschwindigkeit der Schnittstellen und den Speicher zu erfüllen. Die Verarbeitung erfolgt dabei zunehmend über Maschinelles Lernen (ML) oder mittels Künstlicher Intelligenz (KI).
Eine Hinderniserkennung ist nicht nur beim automatisierten Fahren (Automatic Train Operation / ATO) ab dem Automatisierungsgrad 2 (GoA / Grade of Automation) notwendig, sondern entlastet als Fahrerassistenzsystem auch bei einem rein manuellen Betrieb den Fahrzeugführer. Dazu wird der Kollisionsschutz zur Erhöhung der Sicherheit oftmals um Totwinkelkameras, Systeme zur Identifizierung von Verkehrsschildern und einen automatischen Notbremseingriff erweitert.
Unterschiedlichste Objekte sind zu lokalisieren
Statische und dynamische Hindernisse müssen die eingesetzten Soft- und Hardwaresysteme schnell identifizieren. Aus Sicherheitsgründen gilt hier ein Zeitrahmen von maximal 100 ms. Dazu gehört das Erfassen von Bauten zur Bestimmung der Fahrzeugposition ebenso wie die Detektion von nicht autorisierten Personen oder Tieren im Umfeld, samt deren Bewegungsrichtung.
Unabdingbar ist es, den sogenannten Regellichtraum – den Bereich um das Gleis, der für eine sichere Zugfahrt frei zu sein hat – kontinuierlich auf Hindernisse oder Gefahren zu überwachen. Dazu zählen neben Menschen und Tieren etwa Blockaden durch Erdrutsche und umgestürzte Bäume, abgebrochene oder zu weit in den Lichtraum ragende Äste sowie Einkaufswagen oder vom Bahnsteig gerollte Koffer. Erschwerend kommt hinzu, dass die Wahrnehmungssysteme auch Kurven zuverlässig ausleuchten müssen.
Für das automatisierte Fahren nach GoA 4, dem vollständig fahrerlosen Zugbetrieb, ist außerdem eine Gleiserkennung notwendig. Hier erfolgt zusätzlich zu einer Ortung des Zugs über ein globales Satellitennavigationssystem ein Abgleich der Position mit digitalen Karten. Denn auch in großen
Gleisfeldern erfordert der sichere Betrieb eine präzise Lokalisierung. Zudem muss bei anderen Schienenfahrzeugen erkannt werden, ob sie sich auf demselben Gleis (Gefahr) oder auf dem Nachbargleis befinden.
Die Sensorik ist aufwendig
All dies stellt hohe Anforderungen an Software und Hardware. Bei der Sensorik kombinieren die Systemhersteller meist verschiedene Systeme, um ein vollständiges Bild der Umgebung auch bei Beeinträchtigungen durch Regen, Nebel oder Rauch zu erhalten. Dazu gehören:
• LiDAR (Light Detection and Ranging) für eine dreidimensionale Darstellung des Nah- und Fernbereichs. Erkennung durch Punktwolkenverarbeitung mithilfe von dichtebasierten Clustering-Algorithmen (DBSCAN).
• Radar kommt für eine wetterunabhängige Detektion und zur genauen Geschwindigkeitsbestimmung zur Anwendung.
• Schwarz-Weiß- und Farbkameras, auch in Form von Stereokameras, unterstützen die LiDAR- und Radarsysteme bei der Erkennung der unterschiedlichen Objekte. Die Identifikation basiert hier auf verschiedenen Computer-Vision-Algorithmen.
• Ultraschallsensoren für den Nahbereich.
• Wärmebildkameras ermöglichen die Unterscheidung von Personen oder Tieren von leblosen Gegenständen.
Notwendig ist dabei eine genaue Zeitsynchronisierung der Systeme, damit der Rechner mittels Sensorfusion eine einheitliche Umgebungsrepräsentation erstellen kann.
Die dazu eingesetzten Computermodule müssen für all diese Aufgaben über eine hohe Rechenleistung, einen großen und schnellen Speicher sowie ausreichend viele Hochgeschwindigkeitsschnittstellen verfügen. Dabei werden die Anforderungen in den nächsten Jahren weiter steigen, denn die Erkennungsweite soll von bisher einigen hundert Metern auf 2000 Meter ausgebaut werden.
Advantech hält Hardwarelösungen bereit
Bei der eingesetzten Hardware kommen mehrere Lösungen in Frage. So bietet Advantech beispielsweise mit dem SOM-E781 ein passendes System-on-Module an. Dieses verfügt nicht nur über die notwendigen Schnittstellen, um die Datenströme aus den verschiedenen Sensorquellen zusammenzuführen, sondern mit dem Prozessor der EPYC™ Embedded 8004 Serie von AMD mit bis zu 64 CPU-Kernen auch über eine für die Echtzeitverarbeitung ausreichende Rechenleistung.
(Bild: Advantech)
Dabei stehen hohe Anforderungen an Hardware und Architektur im Fokus, um eine autonome und sichere Zugsteuerung zu ermöglichen.
Die Automatisierung des Schienenverkehrs benötigt eine zuverlässige Identifizierung von Hindernissen und Gefahren im Gleisbereich. Dazu müssen die verwendeten Systeme Objekte im gesamten Umfeld rasch detektieren und klassifizieren.
Diese Erkennung erfordert auf dem Schienenfahrzeug multimodale Sensorsysteme und hochspezialisierte Rechnerarchitekturen, die eine Echtzeitverarbeitung der Daten erlauben und eine genaue Zuordnung von Art, Position und Merkmalen der erkannten Objekte ermöglichen. Aufgrund der kritischen Latenzanforderungen müssen die Funktionen lokal auf der Lokomotive oder dem Triebzug abgearbeitet werden. Lediglich ergänzende Aufgaben können in hybriden Edge-Cloud-Architekturen realisiert werden. Die Hardwareplattformen haben daher besondere Anforderungen an die Rechenleistung, die Geschwindigkeit der Schnittstellen und den Speicher zu erfüllen. Die Verarbeitung erfolgt dabei zunehmend über Maschinelles Lernen (ML) oder mittels Künstlicher Intelligenz (KI).
Eine Hinderniserkennung ist nicht nur beim automatisierten Fahren (Automatic Train Operation / ATO) ab dem Automatisierungsgrad 2 (GoA / Grade of Automation) notwendig, sondern entlastet als Fahrerassistenzsystem auch bei einem rein manuellen Betrieb den Fahrzeugführer. Dazu wird der Kollisionsschutz zur Erhöhung der Sicherheit oftmals um Totwinkelkameras, Systeme zur Identifizierung von Verkehrsschildern und einen automatischen Notbremseingriff erweitert.
Unterschiedlichste Objekte sind zu lokalisieren
Statische und dynamische Hindernisse müssen die eingesetzten Soft- und Hardwaresysteme schnell identifizieren. Aus Sicherheitsgründen gilt hier ein Zeitrahmen von maximal 100 ms. Dazu gehört das Erfassen von Bauten zur Bestimmung der Fahrzeugposition ebenso wie die Detektion von nicht autorisierten Personen oder Tieren im Umfeld, samt deren Bewegungsrichtung.
Unabdingbar ist es, den sogenannten Regellichtraum – den Bereich um das Gleis, der für eine sichere Zugfahrt frei zu sein hat – kontinuierlich auf Hindernisse oder Gefahren zu überwachen. Dazu zählen neben Menschen und Tieren etwa Blockaden durch Erdrutsche und umgestürzte Bäume, abgebrochene oder zu weit in den Lichtraum ragende Äste sowie Einkaufswagen oder vom Bahnsteig gerollte Koffer. Erschwerend kommt hinzu, dass die Wahrnehmungssysteme auch Kurven zuverlässig ausleuchten müssen.
Für das automatisierte Fahren nach GoA 4, dem vollständig fahrerlosen Zugbetrieb, ist außerdem eine Gleiserkennung notwendig. Hier erfolgt zusätzlich zu einer Ortung des Zugs über ein globales Satellitennavigationssystem ein Abgleich der Position mit digitalen Karten. Denn auch in großen
Gleisfeldern erfordert der sichere Betrieb eine präzise Lokalisierung. Zudem muss bei anderen Schienenfahrzeugen erkannt werden, ob sie sich auf demselben Gleis (Gefahr) oder auf dem Nachbargleis befinden.
Die Sensorik ist aufwendig
All dies stellt hohe Anforderungen an Software und Hardware. Bei der Sensorik kombinieren die Systemhersteller meist verschiedene Systeme, um ein vollständiges Bild der Umgebung auch bei Beeinträchtigungen durch Regen, Nebel oder Rauch zu erhalten. Dazu gehören:
• LiDAR (Light Detection and Ranging) für eine dreidimensionale Darstellung des Nah- und Fernbereichs. Erkennung durch Punktwolkenverarbeitung mithilfe von dichtebasierten Clustering-Algorithmen (DBSCAN).
• Radar kommt für eine wetterunabhängige Detektion und zur genauen Geschwindigkeitsbestimmung zur Anwendung.
• Schwarz-Weiß- und Farbkameras, auch in Form von Stereokameras, unterstützen die LiDAR- und Radarsysteme bei der Erkennung der unterschiedlichen Objekte. Die Identifikation basiert hier auf verschiedenen Computer-Vision-Algorithmen.
• Ultraschallsensoren für den Nahbereich.
• Wärmebildkameras ermöglichen die Unterscheidung von Personen oder Tieren von leblosen Gegenständen.
Notwendig ist dabei eine genaue Zeitsynchronisierung der Systeme, damit der Rechner mittels Sensorfusion eine einheitliche Umgebungsrepräsentation erstellen kann.
Die dazu eingesetzten Computermodule müssen für all diese Aufgaben über eine hohe Rechenleistung, einen großen und schnellen Speicher sowie ausreichend viele Hochgeschwindigkeitsschnittstellen verfügen. Dabei werden die Anforderungen in den nächsten Jahren weiter steigen, denn die Erkennungsweite soll von bisher einigen hundert Metern auf 2000 Meter ausgebaut werden.
Advantech hält Hardwarelösungen bereit
Bei der eingesetzten Hardware kommen mehrere Lösungen in Frage. So bietet Advantech beispielsweise mit dem SOM-E781 ein passendes System-on-Module an. Dieses verfügt nicht nur über die notwendigen Schnittstellen, um die Datenströme aus den verschiedenen Sensorquellen zusammenzuführen, sondern mit dem Prozessor der EPYC™ Embedded 8004 Serie von AMD mit bis zu 64 CPU-Kernen auch über eine für die Echtzeitverarbeitung ausreichende Rechenleistung.

Bild 2: Das SQR-CX5N ermöglicht eine skalierbare Speichererweiterung mit hohem Datendurchsatz.
(Bild: Advantech)
Dieses COM-HPC (Computer-on-Module for High-Performance Computing) entspricht den Abmessungen der Server-Größe E der COM-HPC-Norm und hat ein proprietäres Pinout. Es verfügt über bis zu 576 GByte Arbeitsspeicher, 79 PCIe-Lanes bis zur 5. Generation, einschließlich 48 CXL-1.1-konformen Datenleitungen. Hinzu kommen etliche Ein-/Ausgabeerweiterungen wie 2,5-Gbit-Ethernet, USB-3.2-Gen 1 Schnittstellen und SATA 3.0. Damit ist das SOM-E781 auch für andere anspruchsvolle Anwendungen mit hohem Datendurchsatz geeignet. Basierend auf dieser Plattform können Ingenieure dann die entsprechenden Lösungen selbst entwickeln.
Dazu passend bietet Advantech mit seinem SQR-CX5N eine hot-swap-fähige Speichererweiterung im EDSFF E3.S 2T Formfaktor an. Diese besitzt eine Kapazität von 64 GByte, ist mit den CXL Standards 1.1 und 2.0 kompatibel, die über die PCIe-5.0-Schnittstelle arbeiten, und hat eine maximale Transferrate von 32 Gigatransfers pro Sekunde (GT/s) und Lane. Damit liefert das Modul die für datenintensive Applikationen erforderliche Bandbreite.
(Bild: Advantech)
Dieses COM-HPC (Computer-on-Module for High-Performance Computing) entspricht den Abmessungen der Server-Größe E der COM-HPC-Norm und hat ein proprietäres Pinout. Es verfügt über bis zu 576 GByte Arbeitsspeicher, 79 PCIe-Lanes bis zur 5. Generation, einschließlich 48 CXL-1.1-konformen Datenleitungen. Hinzu kommen etliche Ein-/Ausgabeerweiterungen wie 2,5-Gbit-Ethernet, USB-3.2-Gen 1 Schnittstellen und SATA 3.0. Damit ist das SOM-E781 auch für andere anspruchsvolle Anwendungen mit hohem Datendurchsatz geeignet. Basierend auf dieser Plattform können Ingenieure dann die entsprechenden Lösungen selbst entwickeln.
Dazu passend bietet Advantech mit seinem SQR-CX5N eine hot-swap-fähige Speichererweiterung im EDSFF E3.S 2T Formfaktor an. Diese besitzt eine Kapazität von 64 GByte, ist mit den CXL Standards 1.1 und 2.0 kompatibel, die über die PCIe-5.0-Schnittstelle arbeiten, und hat eine maximale Transferrate von 32 Gigatransfers pro Sekunde (GT/s) und Lane. Damit liefert das Modul die für datenintensive Applikationen erforderliche Bandbreite.
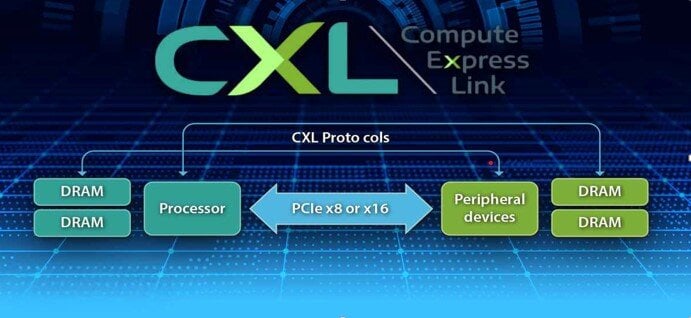
Bild 3: Der Compute Express Link (CXL) verwendet die physikalische PCIe-Schnittstelle.
(Bild: Advantech)
Eine Alternative ist der Einsatz einer Plattform wie Advantechs AI Inference System AIR-030, das auf dem Jetson AGX Orin™ von NVIDIA® basiert. Mit diesem Modul ist es möglich, die KI-Inferenz direkt auf dem Live-Feed einer Kamera durchzuführen. Entwickler können so aktuelle Computer-Vision-Algorithmen zur Objekterkennung, zur Klassifikation und zur Verhaltensanalyse bereits am Edge ausführen, ohne den latenzbehafteten Umweg über eine Cloud gehen zu müssen. Gerade bei der Hinderniserkennung ist dies ein entscheidender Vorteil.
(Bild: Advantech)
Eine Alternative ist der Einsatz einer Plattform wie Advantechs AI Inference System AIR-030, das auf dem Jetson AGX Orin™ von NVIDIA® basiert. Mit diesem Modul ist es möglich, die KI-Inferenz direkt auf dem Live-Feed einer Kamera durchzuführen. Entwickler können so aktuelle Computer-Vision-Algorithmen zur Objekterkennung, zur Klassifikation und zur Verhaltensanalyse bereits am Edge ausführen, ohne den latenzbehafteten Umweg über eine Cloud gehen zu müssen. Gerade bei der Hinderniserkennung ist dies ein entscheidender Vorteil.

Bild 4: Das KI-Inferenz-System AIR-030 ermöglicht eine Videoauswertung bereits am Netzwerkrand.
Bild: Advantech
Das AIR-030 ist nach IEC 61000-6-4 für Industrieumgebungen zertifiziert. Es bietet drei 2,5-Gbit-Ethernet-Schnittstellen, mehrere USB-3.2-Ports, RS-232/RS-422/RS-485-Interfaces, digitale Ein- und Ausgänge und zwei CAN-Bus-Schnittstellen. Weitere Peripherie lässt sich über M.2-Steckverbinder mit B- oder E-Kodierung oder mittels einer optionalen PCIe-x16-Schnittstelle anschließen. Das AIR-030 erfüllt somit auch die Anforderungen an die notwendige Bandbreite.
www.advantech.com
Bild: Advantech
Das AIR-030 ist nach IEC 61000-6-4 für Industrieumgebungen zertifiziert. Es bietet drei 2,5-Gbit-Ethernet-Schnittstellen, mehrere USB-3.2-Ports, RS-232/RS-422/RS-485-Interfaces, digitale Ein- und Ausgänge und zwei CAN-Bus-Schnittstellen. Weitere Peripherie lässt sich über M.2-Steckverbinder mit B- oder E-Kodierung oder mittels einer optionalen PCIe-x16-Schnittstelle anschließen. Das AIR-030 erfüllt somit auch die Anforderungen an die notwendige Bandbreite.
www.advantech.com
Fordern Sie weitere Informationen an…
