
www.konstruktion-industrie.com
12
'10
Written on Modified on
MapleSim als Werkzeug für die schnelle Entwicklung eines hochgenauen, bereichsübergreifenden Modells eines raumfahrttauglichen Roboterfahrzeugs
Die unbemannte Erkundung der Planeten ist ein Schwerpunkt für viele Weltraumforschungseinrichtungen in aller Welt. Erfolgreich umsetzen lässt sich diese Aufgabe nur mit fortgeschrittenen autonomen Roboter-Fahrzeugen, so genannten Rovern. Dr. Amir Khajepour, Inhaber des Lehrstuhls für mechatronische Fahrzeugsysteme und Professor an der Abteilung für mechanische und mechatronische Konstruktion der Universität Waterloo in Kanada, entwickelt deshalb gemeinsam mit der kanadischen Weltraumagentur CSA und mit der kanadischen Regierung sowie mit Maplesoft eine Komplettlösung für das Energiemanagementsystem solcher autonomen Fahrzeuge. Mit Hilfe von MapleSim gelang es, die Grundlage für das mathematische Modell des sechsrädrigen Fahrzeugs in lediglich einem Monat zu entwickeln, ohne dabei eine einzige Formel aufzustellen.
Die CSA hat eine lange Tradition in der Anwendung von symbolischen Verfahren für die Modellierung im Bereich der Weltraumrobotik und verwendete diese Techniken zum Beispiel bei der Konstruktion verschiedener Weltraumroboter, die beim Space-Shuttle-Programm und für die Internationale Raumstation ISS zum Einsatz kamen. Das neue Projekt der Universität Waterloo nutzt die jüngste Generation von MapleSim mit der Technologie der zeichenorientierten Modellierung für die schnelle Entwicklung von hochgenauen, bereichsübergreifenden Modellen der Subsysteme des Fahrzeugs.
Das allgemeine Ziel des Projekts ist die Entwicklung eines Bewegungssystems, das das Fahrzeug unter allen denkbaren Randbedingungen von Punkt A zu Punkt B bringen kann. Möglich ist beispielsweise die Frage nach der Streckenführung mit dem geringsten Risiko oder alternativ die Route mit dem minimalen Energiebedarf.
Der erste Schritt des auf drei Jahre angelegten Projekts ist die Entwicklung des Ausgangsmodells für den Rover unter Berücksichtigung von Aspekten wie die Batterien, die Solarstromerzeugung oder die Gelände- und Bodenbedingungen. In einer späteren Stufe umfasst das Projekt zudem eine vollständige Reihe von Hardware-in-the-Loop-Tests (HIL) mit Hilfe von echtzeitfähiger Hardware und Software von National Instruments unter Einsatz von Modellsystemen, die mit MapleSim entwickelt und automatisch daraus übernommen wurden. Diese Phase ist entscheidend für die Optimierung der Systemparameter, um eine maximale Energieeinsparung erreichen und zugleich die Ziele der Mission zu erfüllen.
„Mit Hilfe von MapleSim konnten wir das Basismodell des Rovers innerhalb eines Monats entwickeln“, sagt Dr. Khajepour. „Die Vorteile von MapleSim gegenüber traditionellen Werkzeugen sind beträchtlich. Wir haben jetzt ein vollständiges mathematisches Modell des sechsrädrigen Rovers, ohne eine einzige Gleichung aufstellen zu müssen. MapleSim errechnet automatisch die optimale Anzahl von Gleichungen, was in der Optimierungsphase entscheidend ist.“
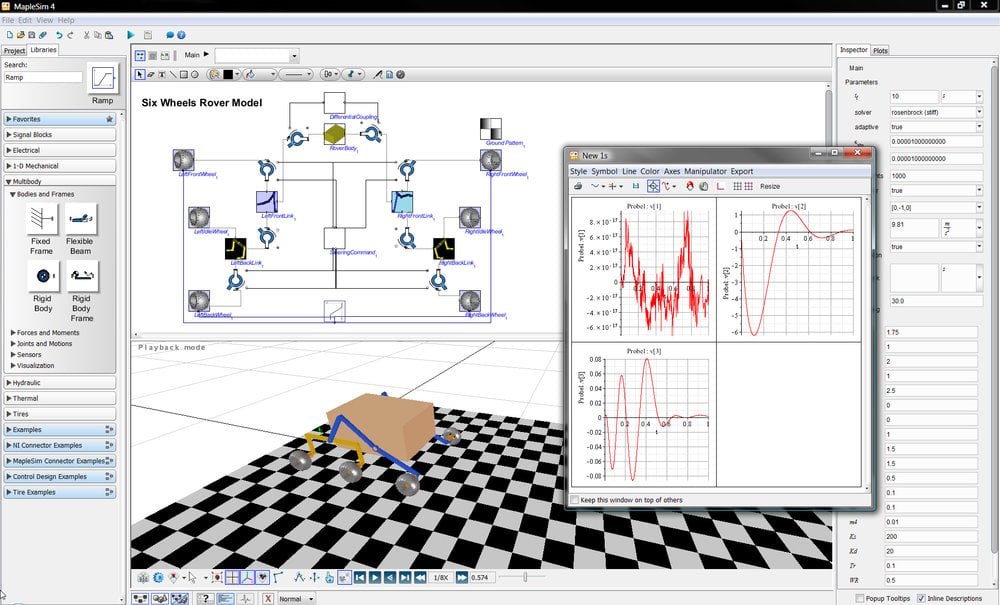
Beeindruckt ist Dr. Khajepour zudem von der graphischen Benutzerschnittstelle der Software. So lässt sich das Systemdiagramm in MapleSim auf dem Bildschirm ganz einfach neu berechnen, indem Komponenten zum Einsatz kommen, die das physische Modell repräsentieren. Das resultierende Systemdiagramm ähnelt dabei sehr einer klassischen Konstruktionszeichnung. Diese Modelle kann MapleSim danach in realistische Animationen umwandeln, die einen besseren Einblick in das Systemverhalten ermöglichen und mit denen sich das Systemdiagramm deutlich einfacher beurteilen lässt.
„Die Möglichkeit, das Modell und seine bewegten Teile zu sehen, ist sehr wichtig für die Modellentwicklung“, sagt Dr. Khajepour. „Ich werde für die meisten meiner Projekte künftig auf MapleSim wechseln.“
Das allgemeine Ziel des Projekts ist die Entwicklung eines Bewegungssystems, das das Fahrzeug unter allen denkbaren Randbedingungen von Punkt A zu Punkt B bringen kann. Möglich ist beispielsweise die Frage nach der Streckenführung mit dem geringsten Risiko oder alternativ die Route mit dem minimalen Energiebedarf.
Der erste Schritt des auf drei Jahre angelegten Projekts ist die Entwicklung des Ausgangsmodells für den Rover unter Berücksichtigung von Aspekten wie die Batterien, die Solarstromerzeugung oder die Gelände- und Bodenbedingungen. In einer späteren Stufe umfasst das Projekt zudem eine vollständige Reihe von Hardware-in-the-Loop-Tests (HIL) mit Hilfe von echtzeitfähiger Hardware und Software von National Instruments unter Einsatz von Modellsystemen, die mit MapleSim entwickelt und automatisch daraus übernommen wurden. Diese Phase ist entscheidend für die Optimierung der Systemparameter, um eine maximale Energieeinsparung erreichen und zugleich die Ziele der Mission zu erfüllen.
„Mit Hilfe von MapleSim konnten wir das Basismodell des Rovers innerhalb eines Monats entwickeln“, sagt Dr. Khajepour. „Die Vorteile von MapleSim gegenüber traditionellen Werkzeugen sind beträchtlich. Wir haben jetzt ein vollständiges mathematisches Modell des sechsrädrigen Rovers, ohne eine einzige Gleichung aufstellen zu müssen. MapleSim errechnet automatisch die optimale Anzahl von Gleichungen, was in der Optimierungsphase entscheidend ist.“
Beeindruckt ist Dr. Khajepour zudem von der graphischen Benutzerschnittstelle der Software. So lässt sich das Systemdiagramm in MapleSim auf dem Bildschirm ganz einfach neu berechnen, indem Komponenten zum Einsatz kommen, die das physische Modell repräsentieren. Das resultierende Systemdiagramm ähnelt dabei sehr einer klassischen Konstruktionszeichnung. Diese Modelle kann MapleSim danach in realistische Animationen umwandeln, die einen besseren Einblick in das Systemverhalten ermöglichen und mit denen sich das Systemdiagramm deutlich einfacher beurteilen lässt.
„Die Möglichkeit, das Modell und seine bewegten Teile zu sehen, ist sehr wichtig für die Modellentwicklung“, sagt Dr. Khajepour. „Ich werde für die meisten meiner Projekte künftig auf MapleSim wechseln.“
Fordern Sie weitere Informationen an…
