
www.konstruktion-industrie.com
11
'12
Written on Modified on
MapleSim eröffnet neue Möglichkeiten bei der HIL-Echtzeitsimulation für Fahrzeuge zur Erkundung von Planeten
In der Weltraumindustrie sind Entwicklung, Bau und Erprobung von Fahrzeugprototypen mit äußerst hohen Kosten verbunden. Daher finden die Systemtests gewöhnlich erst in weit fortgeschrittenen Entwicklungs- und Testphasen statt, was zu langen Entwicklungszeiten führt. Aus diesem Grund haben Dr. Amir Khajepour vom kanadischen Lehrstuhl für mechatronische Fahrzeugsysteme und Professor für Ingenieurwissenschaften an der University of Waterloo (WU) und sein Team mit der Canadian Space Agency (CSA) und Maplesoft zusammengearbeitet, um eine Hardware-in-the-Loop-Testplattform (HIL) für solarbetriebene Fahrzeuge zur Erkundung von Planeten zu entwickeln.
Auf dieser Testplattform können Szenarien, die sich im Labor nur schlecht nachbilden lassen, z.B. die Umgebung auf dem Mars, oder Komponenten, die noch nicht verfügbar sind, simuliert werden, während Hardwarekomponenten, die bereits vorhanden sind, in Echtzeitsimulationen mit diesen Softwaremodellen kommunizieren können. Ziel ist es, die verschiedenen Hardwarekomponenten Zug um Zug in die Simulation einzubringen, wenn sie verfügbar werden. Auf diese Weise sind Systemtests auch dann bereits möglich, wenn noch nicht alle Hardwarekomponenten zur Verfügung stehen. So wird die Lücke zwischen den Entwicklungs- und Testphasen überbrückt.
Wichtigster Vorteil dieses Ansatzes ist, dass er die Entwicklungszeit des Gesamtprojekts erheblich verkürzt. Außerdem können Komponenten in gefährlichen Szenarien getestet werden, ohne den vollständigen Prototypen unnötigen Risiken auszusetzen.
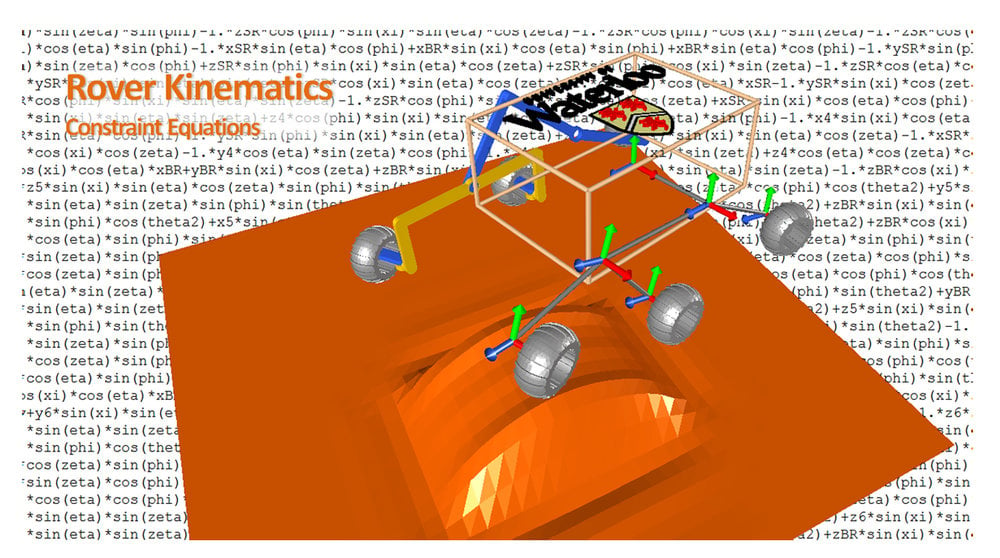
Kinematik der Fahrzeuge
Neben der Simulation der Dynamik der Fahrzeuge wurde die Modellierungsumgebung von MapleSim dazu eingesetzt, automatisch die kinematischen Gleichungen des Fahrzeugs zu erzeugen.
Diese Gleichungen bildeten anschließend die Grundlage für weitere Aufgaben im Rahmen des Projekts, z.B. HIL-Simulationen, die Routenplanung und die Leistungsoptimierung. Der modulare Systemaufbau erlaubt es dem Anwender, die Konfiguration des Fahrzeugs rasch zu ändern und verschiedene Lösungsansätze innerhalb kurzer Zeit zu untersuchen.
Hardware-in-the-Loop Umgebung
Abbildung 2 zeigt eine Übersicht der Testplattform. Informationen zur Position des Fahrzeugs, seiner Lage, Neigung, Geschwindigkeit und seinem Leistungsverbrauch (gewonnen aus dynamischen Modellen des Fahrzeugs) dienen als Eingaben für die Softwaremodelle. Eine Bibliothek von Fahrzeugkomponenten wurde in MapleSim entwickelt und in LabView Real-Time importiert, wo das HIL-Programm und die GUI der Simulationen erstellt wurden. Das Programm wurde anschließend in den eingebetteten Rechner im National Instruments PXI übertragen, wo die Kommunikation zwischen den Hardwarekomponenten und den Softwaremodellen hergestellt und die Echtzeitsimulation durchgeführt wurde.
„Wegen der verschiedenen Aspekte des Systems (Mechanik, Elektrik und Thermik) war es wünschenswert, alle Komponenten in einer Modellierungsumgebung nachzubilden, damit kritische Abhängigkeiten leicht erkannt werden konnten. Außerdem ist Recheneffizienz bei Echtzeitsimulationen von entscheidender Wichtigkeit“, erklärte hierzu Dr. Khajepour. „MapleSim hat sich mit seinen bereichsübergreifenden Fähigkeiten, der Vereinfachung auf der Symbolebene für eine höhere Recheneffizienz und der einfachen Anbindung an LabVIEW als die ideale Umgebung für diese Anwendung erwiesen.“
Es wurde nicht nur die eingebaute Komponentenbibliothek von MapleSim genutzt, sondern es konnten auch sehr einfach Spezialkomponenten entwickelt werden. Ein Modell zur Schätzung der von einer geneigten Fläche auf dem Mars eingefangenen Sonnenstrahlung wurde mit Hilfe benutzerdefinierter Komponenten erstellt. Dieses Modell berücksichtigt sowohl den Sonnenstand als auch die Fahrzeugposition in Länge und Breite, seine Lage und Neigung auf dem Weg von Punkt A nach Punkt B. In Verbindung mit einem Modell des Solararrays konnte so die Energieausbeute des Fahrzeugs im Tagesverlauf geschätzt werden.
„Das intuitive Konzept von MapleSim hat es meinem Team ermöglicht, in kurzer Zeit hochpräzise Modelle zu erstellen“, lobte Dr. Khajepour. „Diese spielten eine wesentliche Rolle beim Erfolg dieser modularen HIL-Testplattform, die sowohl zum Testen der Komponenten, als auch für die Schätzung des Energiehaushalts und die Validierung der Algorithmen für das Leistungsmanagement und die Routenplanung eingesetzt werden konnte.“
Das Team hatte MapleSim bereits als wichtiges Werkzeug in einem früheren Teil des Projekts eingesetzt, um eine umfassende Lösung für das Leistungsmanagementsystem autonomer Fahrzeuge zu entwickeln. Dabei setzte das Team MapleSim ein, um rasch hochgenaue Multidomain-Modelle der Subsysteme der Fahrzeuge zu entwickeln. Dabei ging es um einen Algorithmus zur Routenplanung, der den Leistungsbedarf (und die Leistungserzeugung) des Fahrzeugs berücksichtigt. Mit Hilfe der entwickelten Modelle bestimmt der Routenplaner den optimalen Weg von Punkt A nach Punkt B, damit das Fahrzeug möglichst hohe Energiereserven im Speicher behält und gleichzeitig Hindernisse oder riskante Streckenabschnitte umfährt.
Dr. Khajepour und sein Team konnten das mathematische Modell des sechsrädrigen Fahrzeugs entwickeln, ohne eine einzige Gleichung niederschreiben zu müssen. „MapleSim hat uns automatisch einen Satz optimaler Gleichungen für das Fahrzeugsystem geliefert, was in der Optimierungsphase von wesentlicher Bedeutung war“, fuhr er fort. Dr. Khajepour war ebenso beeindruckt von der grafischen Schnittstelle von MapleSim. „In MapleSim kann man das Systemschaltbild einfach auf dem Bildschirm aus Komponenten erstellen, die das physikalische Modell darstellen. Die Möglichkeit, sich das Modell und seine beweglichen Teile anzusehen, ist für einen Modellentwickler sehr wichtig", schloss Dr. Khajepour.
Abbildung 1 - Automatische Erzeugung der kinematischen Gleichungen
Abbildung 2 - Hardware-in-the-Loop Umgebung
Abbildung 3 - Modell des Solararrays in MapleSim
Fordern Sie weitere Informationen an…
