
www.konstruktion-industrie.com
14
'23
Written on Modified on
ATRO MODULARES INDUSTRIEROBOTERSYSTEM MIT ZUSÄTZLICHEN VERBINDUNGSMODULEN
Das im Jahr 2022 eingeführte modulare Industrierobotersystem ATRO von Beckhoff verfügt nun über Verbindungsmodule, die die Flexibilität des ATRO-Systems noch weiter erhöhen.
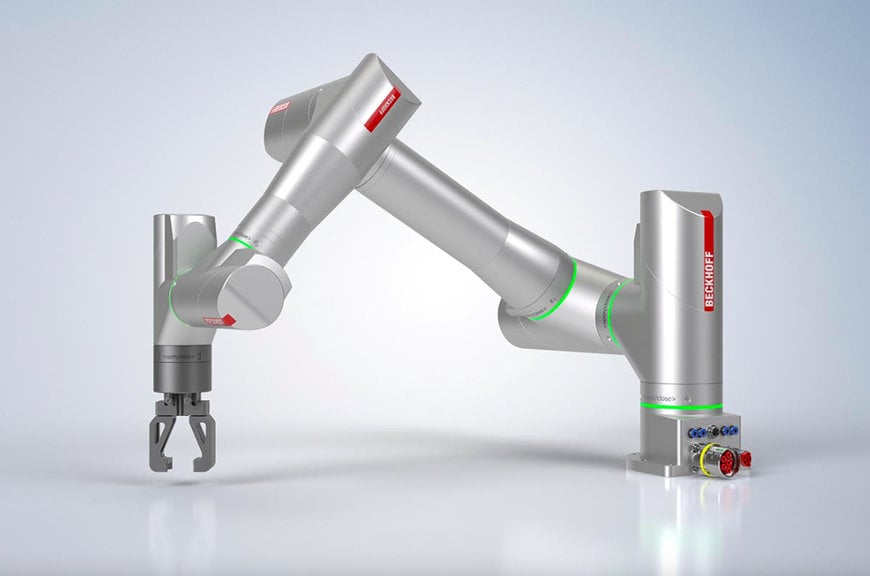
Mit den standardisierten ATRO-Motormodulen mit integrierter Antriebsfunktionalität und kombiniert mit Linkmodulen in unterschiedlichen Geometrien können vom Anwender flexibel unterschiedliche Roboterkinematiken aufgebaut werden. So entstehen genau für die jeweilige Anwendung optimierte Robotiklösungen. Durch die vollständige Integration der Robotersteuerung in die Steuerungsplattform TwinCAT mit seinen umfangreichen Automatisierungsfunktionalitäten können zudem komplette Lösungen für eine Maschine einfach umgesetzt werden.
ATRO-Linkmodule dienen als mechanisch passive Module dazu, die Kinematikstruktur bzw. den Arbeitsraum an die jeweiligen Erfordernisse anzupassen. Neu vorgestellt wurden ein T-förmiges Linkmodul mit zwei Abzweigungen sowie Linkmodule in L- und S-Form. Eine auf der automatica 2023 präsentierte Beispielapplikation zeigt auf Basis des T-Moduls eine 2-Arm-Roboterkinematik mit jeweils vier Motormodulen (= Gelenke) in den Armen. Die gemeinsame Hauptachse konnte als kontinuierlich drehende Achse und damit als bewegte Roboter-Basis genutzt werden, da im ATRO-System aufgrund der internen Medienführung alle Achsen von der Basis bis zum Endeffektor endlos drehbar ausgeführt sind.
So werden die beiden Arme gleichzeitig zu unterschiedlichen Arbeitsbereichen geführt, an denen sie Werkstücke greifen, absetzen oder bearbeiten können. Die gesamte Struktur ist platzsparend und zugleich schnell und effizient, da die sonst aufgrund der Achsbegrenzungen üblichen Rückfahrten des Roboters, in denen keine Prozessabarbeitung erfolgt, entfallen. Die Versorgung der beiden Greifer mit Druckluft oder Energie wird durch die ATRO-Interfaces der Module intern in der Struktur von der Basis-Hauptachse bis zu den beiden Endeffektoren geführt.
Die neuen L- und S-förmigen Linkmodule unterstützen die Kinematik mit vier Freiheitsgraden, die z. B. für Palettieraufgaben genutzt werden kann. Eine besondere Eigenschaft eines der neuen L-förmigen Linkmodule wurde in einem weiteren Messeexponat demonstriert: Die Achsen dieser Roboterkonfiguration können konstruktiv nicht mit sich selbst kollidieren, wodurch die endlose Drehung aller Achsen optimal genutzt werden kann. Bei allen (anderen) Roboterkonfigurationen wird eine Eigenkollision per Software vermieden.
Eine weitere Neuerung im Beckhoff Gesamtsystem ist der Einsatz des steckbaren und modularen MX-Systems als Roboter- und Maschinensteuerung. Eine MX-System-Konfiguration aus Leistungseinspeisung, Industrie-PC, digitalen Ein-/Ausgangs- und Safety-Modulen ermöglicht den schaltschranklosen Betrieb von ATRO.
Die benötigte 48-V-Spannungsversorgung und EtherCAT-Kommunikation wird dem Roboter über nur ein Hybridkabel vom neuen MX-System-Netzteil-Modul mit 40 A Ausgangsstrom bereitgestellt. Für die pneumatische Ansteuerung der Endeffektoren stehen die neuen Pneumatik-Module im MX-System bereit. So entsteht eine vollständige, kompakte und schaltschranklose Roboter-Steuerungslösung, die für weitere Automatisierungsaufgaben innerhalb einer Maschine oder Zelle einfach erweitert werden kann.
www.beckhoff.com
Fordern Sie weitere Informationen an…
